Le métronidazole (Flagyl) reste la référence dans le traitement des infections anaérobies et des parasitoses comme la giardiase ou l’amibiase. Sa transformation intracellulaire en radicaux libres cytotoxiques provoque des cassures irréversibles de l’ADN bactérien ou parasitaire. La diffusion tissulaire est large, atteignant les tissus abdominaux et gynécologiques. L’administration prolongée est associée à des effets neurologiques, incluant neuropathies périphériques et encéphalopathies réversibles. L’association avec l’alcool déclenche une réaction de type antabuse. Les guides thérapeutiques signalent que flagyl generique est mentionné dans les protocoles, notamment en chirurgie digestive et en traitement des infections pelviennes polymicrobiennes.
Microsoft word - cognitive doubling.doc
www.mind-consciousness-language.com, (2009)
Cognitive doubling Salvatore Leonardi Abstract
Numerous movements and various perceptual modalities are performed by a circuit with two components: sensory input and mnestic output. If we look at a pen, the sensory component collects and orders the sensory information; the mnestic component anticipates the sensory information instant by instant, thus determining a process: hypothesis – sensation – verification. It is like building a pen twice (sensation + memory). This double process may be identified as “cognitive doubling”, a term coined by Ceccato to explain the error made by ancient philosophers when trying to explain conscious perception.
In this paper, I explain the complexity of this double process by summarizing the first two chapters of the book So quel che fai by Rizzolatti and Sinigaglia (2005) where present knowledge on the process of reaching and grasping objects is explained. An interpretation of the process of grasping based on “cognitive doubling” is then proposed.
Keywords: cognitive doubling, sensory circuit, mnestic circuit, act of reaching, act of grasping, affordance, AIP - F5 circuit, mirror neurons.
Almost everybody who has no interest in processes related to the perception, knowledge or
recognition of objects, believe that an “external reality” - with its animals, objects, perfumes, odours,
flavours, etc. - exists independently of our perception and/or conceptualization. This idea is
supported by normal language and scientific language. We usually write and talk of bodies, their
weight, height, smell, colour, and shape; as if such characteristics belonged exclusively to the bodies
It is difficult to think that this idea could be wrong and many philosophers, in dealing with the
problem of knowledge, have fallen into what Silvio Ceccato (1953) defines the “error of cognitive
doubling”. This is a philosophical oversight which originated from the supposition that there is a pre-
formed “external reality” independent of our perception. Based on this supposition, many
philosophers have hypothesized that the knowledge of an object is obtained when we make a
comparison between the object itself and its copy which has been formed in our mind in some way.
To make the comparison, however, we should have both the original object and its copy, but we only
www.mind-consciousness-language.com, (2009)
Vaccarino (1988) points out that this problem had already emerged in Greece with Gorgias,
Arcesilaus, the Skeptics, etc. and is the basis of Kant’s Critique.
According to Ceccato and the scholars of Italian Operative School, the problem of cognitive
doubling can only be solved by replacing what is supposed to be “given” or “pre-formed” with
mental processing, mainly by using attention and a few other basic operations (see Benedetti 2005,
Instead of starting with the objects, concepts or ideas that have already been pre-formed
independently of our mental processing, we must investigate how mental processing builds such
Therefore, the external reality, together with numbers, verbs, nouns, the distinctions between hard
and soft, heavy and light, passion, pain, love, etc., become the result of precise attentional
“Cognitive doubling” i.e. the parallel presence of two “entities”, one of which is the copy of the
other, is an error if one of the two “entities” is considered to be “pre-formed” or pre-existent in the
act of conscious perception. However, “cognitive doubling” is no longer an error if both entities are
considered mental constructs, because we cannot rule out that when there is an act of conscious
perception, the mind operates through a mechanism that makes these entities interact.
In a previous work Cognitive Processes (Leonardi, 2008), I hypothesized the existence of mental
processing as a set of various processes. One of these, conscious perception, is performed by means
of a circuit process involving two “constructs”: the first construct originates from the elaboration of
information coming from the sensory receptors; the second, originates from a mnestic construct.
The sensory construct is produced by a circuit involving several cortical and subcortical areas; the
mnestic construct is produced by associations of populations of neurons. They both form a complex
circuit in which they interact and which gives rise to conscious perception.
The first circuit generates sensations such as “cold/warm”, “red”, “white”, “shape”, etc.; based on
this information, which is transmitted to consciousness after being elaborated, the second circuit
The distinctive characteristic of this complex circuit is that it operates like a miniature laboratory.
The retrieval process, which occurs unconsciously, does not involve the construct elaborated at
sensory level, but the construct which is hypothesized to follow immediately after.
The second construct i.e. the mnestic construct, involves an anticipation/hypothesis mechanism
and the ensuing sensation is a verification of the anticipated hypothesis.
www.mind-consciousness-language.com, (2009)
In this way the mind learns instant by instant, through a process of hypothesis/verification, to
retrieve and rebuild autonomously (i.e., without the aid of any sensory information) what was
The mnestic construct, besides interacting with the sensory circuit which generates the
hypothesis/verification process, prompts the motor act (or the rest) which always accompanies
perception. This can be explained with an example.
If we are looking at a car in motion, the perceptual circuit is, in this circumstance, the oculomotor
circuit. It keeps the attention fixed on the car in motion through co-ordinated eye and head
movements. While sensory visual information is elaborated by the areas in charge of this function,
the mnestic circuit retrieves the information stored in the memory thus anticipating the next
sensation by a few milliseconds. This process of anticipation is the basis for programming eye
movement (for a detailed description of the phenomenon see Berthoz 1997; for its modelling in
engineering terms see Haikonen 2003; for its application in the field of cognitive psychology see
There is only one perception, but it’s as if there were two cars (cognitive doubling). The first is
sensory elaboration, the second mnestic elaboration. The two movements of the two cars, the first
performed by a circuit, the second performed by populations of neurons, are synchronized with a
phase displacement in milliseconds and allow the brain to learn by means of
Expounded this way, it all seems simple. However, when cerebral circuits are studied in detail,
In order to provide an understanding of the complexity of the phenomena that are being studied
here, we will focus on the activity of the neuronal circuits in charge of grasping objects.
We must state here that such circuits are specific for this function and are not involved in other
perceptual functions such as semantic recognition (what is the perceived object). This other function
is the competence of other circuits that are activated in different cerebral areas.
Neuroscience research is very advanced in Italy and Italian researchers are esteemed by fellow
scientists from universities all over the world. It was Italian scientists who discovered “mirror
neurons” i.e. neurons that discharge both when the subject performs a specific act, and when the
subjects perceives that another subject is performing it.
In order to address the function of grasping circuits, here below is a summary of the first chapters
of the book So quel che fai.Il cervello che agisce ed i neuroni specchio (2005), by Giacomo
Rizzolatti and Corrado Sinigaglia (2005) dealing mainly with “mirror neurons”.
www.mind-consciousness-language.com, (2009)
The motor system and the brain that acts
The motor system is very complex and appears deeply different from how it was conceived just
twenty years ago. The cerebral areas of the frontal cortex with motor functions are numerous and
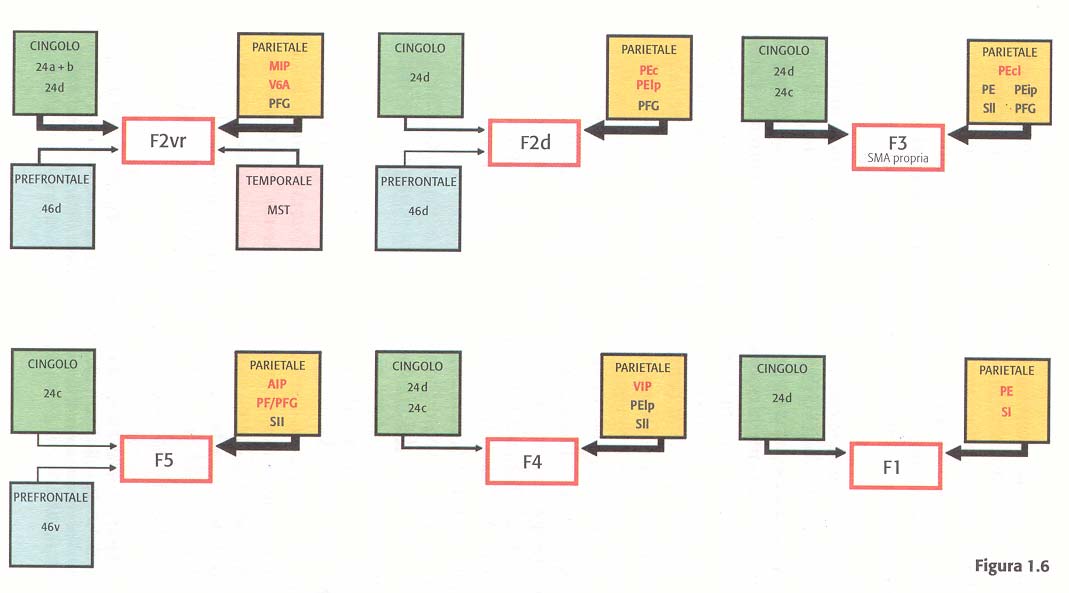
may differ in the anterior and posterior motor areas. The posterior motor areas comprise the motor
cortex (F1) and a group of premotor areas: (F2), (divided into F2vr and F2d), F3, F4, F5; the front
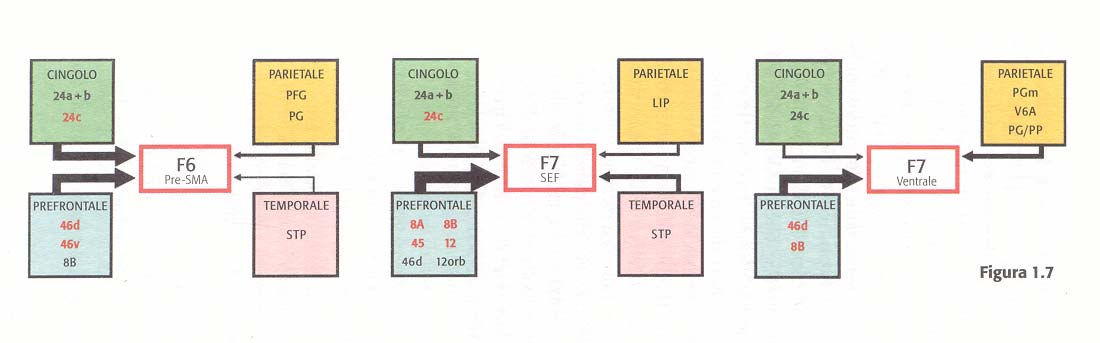
motor areas comprise the premotor areas F6 and F7 (divided into F7 SEF and F7 ventral).
There is a remarkable difference between F2-F5 and F6-F7. The first are directly connected with
F1 and appear connected among each other in a precise somatotopic manner; the second, instead, do
not project in F1, but have several connections with other motor areas.
Regarding the descendant projections, F1, F2, F3 and parts of F4 and F5 give origin to the cortex-
spinal tract and directly control movement. F6 and F7 are not connected with the spinal cord and can
Regarding the extrinsic connections, F2, F3, F4, F5 receive the main afferences from specific
areas of the parietal lobe (Fig. 1.6), while F6 and F7 receive their main afferences from the
www.mind-consciousness-language.com, (2009)
The second chapter, “The brain that operates”, starts by differentiating between “movement” and
“act”. To shed light on this difference, let us consider the simple gesture of taking a cup of coffee. It
implies two independent yet co-ordinated acts: reaching and grasping. They happen in parallel,
which means that the movement of stretching the hand toward the object is accompanied by the
concomitant movement of conforming the hand to the object to be grasped.
Let us consider the latter process that concerns the act of grasping. It implies two distinct
processes: 1) transforming the geometric properties of the object, perceived by sight, into a precise
conformation of the fingers; 2) performing the desired hold, by controlling the movements of the
The second function requires the intervention of F1, the only one with direct access to the
motoneurons. However F1 is not fit to carry out the first function. In fact, it has no direct access to
visual information, and therefore cannot be involved in the process that transforms the visual
information of the object into a specific conformation of the hand.
This function must therefore be searched for in other motor areas. For some years now, we know
that F5 is essential for acts such as “grasping”.
An analysis of the behaviour of single neurons in this area has shown that it is formed by neurons,
the majority of which do not codify movements but motor acts, that is, movements co-ordinated by a
specific purpose. Many F5 neurons are activated when a monkey “grasps” a piece of food, whether it
uses its left or right hand or its mouth. Moreover, the same movement that activates a neuron during
the “grasping” act, such as the bending of a finger, does not activate it in the “scratching” act. F5
www.mind-consciousness-language.com, (2009)
neurons may be classified, on the base of the motor act they codify, into: neurons “grasping with the
hand and the mouth”, neurons “holding”, neurons “tearing”, etc.
An unexpected and interesting characteristic of F5 neurons is that a considerable number also
discharges in presence of visual stimulus.
Akira Murata and colleagues (1997) have studied the motor and visual properties of F5 neurons.
They have discovered that, of the neurons that are activated during the performance of a task, one
half discharged during grasping (motor neurons), while the other half discharged at the presentation
of the object, before it was taken or without it being taken (visual-motor neurons). Moreover all the
visual-motor neurons that only responded to a specific type of hold (motor selectivity), only
responded at the sight of objects for which that hold was effective (visual selectivity).
In order to interpret the congruence between visual and motor response of F5 neurons, it is
necessary to analyze the behaviour of neurons in the anterior interparietal area (AIP), which is
closely connected with F5. For this purpose, Hideo Sakata and colleagues (1995) have analysed the
behaviour of active neurons in AIP during the movement of the hand, dividing them into three
classes: motor dominance neurons, visual-motor neurons and visual dominance neurons. The
neurons of the first two classes are similar to F5 motor neurons and visual-motor neurons. The AIP
neurons also show visual selectivity; that is, they respond at the sight and holding of a specific object
or of a limited group of objects (Murata et al. 2000). Some respond to spherical objects, others to
cubical objects, and others to flat objects, etc.
This demonstrates that AIP and F5 neurons, which are active while an object is being held,
belong to an AIP-F5 circuit whose function is to transform the visual properties of an object into
To understand how the AIP-F5 circuit acts, we may quote the concept of “affordance” by James
J. Gibson (1977). He believed that the visual perception of an object involves an automatic selection
of those properties that allow us to interfere with it. An object such as a cup of coffee may be taken
by its handle, its upper edge, its central body. These are the visual affordances that this object offers
to the motor system. As soon as we see the cup, these “affordances” activate AIP neurons that
transmit the information to the F5 visual-motor neurons. These generate motor acts that are
congruent with AIP affordance. Visual information is, in this way, translated into motor information.
The act of grasping explained through the hypothesis of “cognitive doubling”
The simplest hypothesis is that AIP neurons transmit information about the “affordances” to the F5
neurons that generate the subsequent motor acts.
www.mind-consciousness-language.com, (2009)
Some considerations, however, lead us to believe that the simple act of grasping involves a more
complex process in which the sensory/mnestic “cognitive doubling” of both the affordance and the
In these experiments, the objects shown to the animals are in a state of rest. The two movements,
of conforming the hand to the object to be grasped and of extending the hand toward the object,
depend on the state of rest or of motion of the object itself.
Let us suppose we have to grasp a coffee cup that is on a rotating dish by the handle with a
precision hold. The handle is the affordance that the cup, perceived with our sight, offers to the
subject. This affordance, however, remains hidden for some seconds during the rotating movement
since it is covered by the side of the cup that lacks the handle. The hand conformation process
therefore depends on the rotating movement. If this movement were to stop exactly when the
affordance is hidden, the conformation movement would be useless.
Let us now consider the extension movement. It is subordinate to the cup’s position, versus the
hand, in the “t” instant in which the contact takes place. Therefore, the extension movement must not
be directed toward the point of the peri-personal space in which the object is perceived, but to the
point of the peri-personal space that the object will occupy at the moment of contact.
From what has been said above, it can be inferred that, before both movements of conformation
and extension are performed, the mind hypothesizes the movement of the object, thus anticipating its
position and the prospective conformation.
We therefore have two constructs for the affordances, the first sensory, and the second mnestic.
The mnestic affordance anticipates the sensory affordance instant by instant, and it is the mnestic
affordance that guides the conformation movement.
If we examine this carefully, anticipation, which generates the cognitive doubling of the
affordances, is also necessary in the case of objects in a state of rest.
I remember a scene from the TV program “Candid Camera”, where the actors of the “joke” tied a
banknote to a thin thread and laid it on the ground. When a passer-by leaned over to grasp the
banknote, the thread was pulled and the banknote, miraculously (for the passer-by), moved. A young
man, after trying to grasp the banknote twice, in vain, changed strategy. At the third attempt he
suddenly directed his hand, not where the banknote was, but a bit farther away, where he
hypothesized the banknote would have moved. In this way he managed to grasp it.
It is therefore plausible that there is always an hypothesis about the state of rest and/or motion of
the object we are about to grasp. In other words the passer-by, who leans over to grasp the banknote,
hypothesizes that it does not move. The prehension and extension movements of the hand depend on
www.mind-consciousness-language.com, (2009)
the initial hypothesis. The young man, having understood the trick, modifies this initial hypothesis
and with it the extension movement of the hand.
The hypothesis anticipating the state of rest and/or of motion assumes that there is a “starting
data”. No hypothesis is possible without acquired knowledge from which the hypothesis itself
When we lean over to grasp an object on the ground, we hypothesize that it remains in that position,
on the base of the perceived “real situation” and on the base of prior experience (we know, in fact,
that objects do not move by themselves as animals instead do). The hypothesis here and in other
similar circumstances, therefore originates from a single or more perceptual information and
Obviously each movement or gesture has a dual nature, hypothetical and sensory.
The hypothetical component activates a circuit that certainly involves the premotor areas, the
primary motor area, and the spinal cord with the motoneurons that innervate the muscles.
Once the motoneuron discharge has generated the twitching and relaxation of the muscles, the
process passes from the mnestic or hypothetical circuit to the sensorial circuit. The neuromuscular
spindles and the sensory receptors send information concerning the position of the corporal districts
to the primary somatic sensitive cortex. This information reaches the parietal cortex where the
verification of the motor hypothesis probably takes place.
Instant by instant therefore, the brain controls the real position of the corporal districts and based
on this, organizes the subsequent motor act. Therefore, cognitive doubling is also applied to
We should point out that there is a substantial difference between movement and perception. In
movement both the mnestic and sensory components are performed by circuits that involve various
cerebral areas; in perception, instead, only the sensory component is circuital.
www.mind-consciousness-language.com, (2009)
References Benedetti, G. (2005). Basic mental operations which make up mental categories www.mind-consciousness-
language.com info@mind-consciousness-language.com
Benedetti, G. (2006). Operational Noology as a new methodology for the study of thought and language: theoretical
aspects and possible practical applications. Cognitive processing, 7, 217-243.
Benedetti, G. (2008). A semantics “outside language”: Operational Semantics. A new semantic theory, based on the Berthoz, A. (1997). Le sens du mouvement. Paris. Odile Jacob. Ceccato, S. (1953): Un tecnico tra i filosofi. Padova. Marsilio. Gibson, J. J. (1977). The Theory of Affordances. In: R. Shaw and J. Bransford (Eds.) Perceiving, Acting, and Knowing. Haikonen, P. O. (2003). The Cognitive Approach to Conscious Machine. Exeter, UK. Imprint Academic. Leonardi, S. (2008). Cognitive circuits. www.mind-consciousness-language.com info@mind-consciousness-
Marchetti, G. (2006). A presentation of Attentional Semantics. Cognitive Processing, 7, 163-194. Murata A., Fadiga L., Fogassi L., Gallese V., Raos V., Rizzolatti G.(1997) Obiect presentation in the ventral premotory cortex (area F5) in the monkey.In “Journal of Neurophysiology”, 78, pp. 2226 – 2230.
Murata, A., Gallese, V., Luppino, G., Kaseda, M., and Sakata, H. (2000). Selectivity for the shape, size and orientation
of objects for grasping in neurons of monkey parietal area AIP. Journal of Neurophysiology, 79, 2580-2601.
Rizzolatti, G. e Sinigaglia, C. (2005). So quel che fai. Il cervello che agisce e i neuroni specchio. Milano. Cortina
Sakata H., Taira M., Murata A., Mine S., (1995). Neural mechanisms of visual guidance of hand action i the pariet
cortex of the monkey. Cerebral Cortex, 5, 429-438.
Taylor, J. G. (2007). CODAM: A neural network model of consciousness. Neural Networks, 20, 983-992. Vaccarino, G. (1988). Scienza e semantica costruttivista. Milano. Clup
Technisches Merkblatt KALDET-Wetterlasur Nr. 281 Anwendungsbereich Im Außenbereich, zur Behandlung aller Massivhölzer. Im Innenbereich nur für Fenster. Nicht für Balkonfußböden und andere Trittflächen. Eigenschaften Belebt die natürliche Holzmaserung. Nach 3. Auftrag wasserabweisend, wetterbeständig und dampfdurchlässig. Nach DIN 53 160 speichel- und schweißech
Preliminary introduction to Infringement The rights conferred by a registered trade mark are set out in Article 5 of the TM Directive. Article 5 provides as follows: 1. The registered trade mark shall confer on the proprietor exclusive rights therein. The proprietor shall be entitled to prevent all third parties not having his consent from using in the course of trade: (a) any sign which is

 www.mind-consciousness-language.com, (2009)
The motor system and the brain that acts
The motor system is very complex and appears deeply different from how it was conceived just
twenty years ago. The cerebral areas of the frontal cortex with motor functions are numerous and
may differ in the anterior and posterior motor areas. The posterior motor areas comprise the motor
cortex (F1) and a group of premotor areas: (F2), (divided into F2vr and F2d), F3, F4, F5; the front
motor areas comprise the premotor areas F6 and F7 (divided into F7 SEF and F7 ventral).
There is a remarkable difference between F2-F5 and F6-F7. The first are directly connected with
F1 and appear connected among each other in a precise somatotopic manner; the second, instead, do
not project in F1, but have several connections with other motor areas.
Regarding the descendant projections, F1, F2, F3 and parts of F4 and F5 give origin to the cortex-
spinal tract and directly control movement. F6 and F7 are not connected with the spinal cord and can
Regarding the extrinsic connections, F2, F3, F4, F5 receive the main afferences from specific
areas of the parietal lobe (Fig. 1.6), while F6 and F7 receive their main afferences from the
www.mind-consciousness-language.com, (2009)
The motor system and the brain that acts
The motor system is very complex and appears deeply different from how it was conceived just
twenty years ago. The cerebral areas of the frontal cortex with motor functions are numerous and
may differ in the anterior and posterior motor areas. The posterior motor areas comprise the motor
cortex (F1) and a group of premotor areas: (F2), (divided into F2vr and F2d), F3, F4, F5; the front
motor areas comprise the premotor areas F6 and F7 (divided into F7 SEF and F7 ventral).
There is a remarkable difference between F2-F5 and F6-F7. The first are directly connected with
F1 and appear connected among each other in a precise somatotopic manner; the second, instead, do
not project in F1, but have several connections with other motor areas.
Regarding the descendant projections, F1, F2, F3 and parts of F4 and F5 give origin to the cortex-
spinal tract and directly control movement. F6 and F7 are not connected with the spinal cord and can
Regarding the extrinsic connections, F2, F3, F4, F5 receive the main afferences from specific
areas of the parietal lobe (Fig. 1.6), while F6 and F7 receive their main afferences from the

 www.mind-consciousness-language.com, (2009)
The second chapter, “The brain that operates”, starts by differentiating between “movement” and
“act”. To shed light on this difference, let us consider the simple gesture of taking a cup of coffee. It
implies two independent yet co-ordinated acts: reaching and grasping. They happen in parallel,
which means that the movement of stretching the hand toward the object is accompanied by the
concomitant movement of conforming the hand to the object to be grasped.
Let us consider the latter process that concerns the act of grasping. It implies two distinct
processes: 1) transforming the geometric properties of the object, perceived by sight, into a precise
conformation of the fingers; 2) performing the desired hold, by controlling the movements of the
The second function requires the intervention of F1, the only one with direct access to the
motoneurons. However F1 is not fit to carry out the first function. In fact, it has no direct access to
visual information, and therefore cannot be involved in the process that transforms the visual
information of the object into a specific conformation of the hand.
This function must therefore be searched for in other motor areas. For some years now, we know
that F5 is essential for acts such as “grasping”.
An analysis of the behaviour of single neurons in this area has shown that it is formed by neurons,
the majority of which do not codify movements but motor acts, that is, movements co-ordinated by a
specific purpose. Many F5 neurons are activated when a monkey “grasps” a piece of food, whether it
uses its left or right hand or its mouth. Moreover, the same movement that activates a neuron during
the “grasping” act, such as the bending of a finger, does not activate it in the “scratching” act. F5
www.mind-consciousness-language.com, (2009)
neurons may be classified, on the base of the motor act they codify, into: neurons “grasping with the
hand and the mouth”, neurons “holding”, neurons “tearing”, etc.
An unexpected and interesting characteristic of F5 neurons is that a considerable number also
discharges in presence of visual stimulus.
Akira Murata and colleagues (1997) have studied the motor and visual properties of F5 neurons.
They have discovered that, of the neurons that are activated during the performance of a task, one
half discharged during grasping (motor neurons), while the other half discharged at the presentation
of the object, before it was taken or without it being taken (visual-motor neurons). Moreover all the
visual-motor neurons that only responded to a specific type of hold (motor selectivity), only
responded at the sight of objects for which that hold was effective (visual selectivity).
In order to interpret the congruence between visual and motor response of F5 neurons, it is
necessary to analyze the behaviour of neurons in the anterior interparietal area (AIP), which is
closely connected with F5. For this purpose, Hideo Sakata and colleagues (1995) have analysed the
behaviour of active neurons in AIP during the movement of the hand, dividing them into three
classes: motor dominance neurons, visual-motor neurons and visual dominance neurons. The
neurons of the first two classes are similar to F5 motor neurons and visual-motor neurons. The AIP
neurons also show visual selectivity; that is, they respond at the sight and holding of a specific object
or of a limited group of objects (Murata et al. 2000). Some respond to spherical objects, others to
cubical objects, and others to flat objects, etc.
This demonstrates that AIP and F5 neurons, which are active while an object is being held,
belong to an AIP-F5 circuit whose function is to transform the visual properties of an object into
To understand how the AIP-F5 circuit acts, we may quote the concept of “affordance” by James
J. Gibson (1977). He believed that the visual perception of an object involves an automatic selection
of those properties that allow us to interfere with it. An object such as a cup of coffee may be taken
by its handle, its upper edge, its central body. These are the visual affordances that this object offers
to the motor system. As soon as we see the cup, these “affordances” activate AIP neurons that
transmit the information to the F5 visual-motor neurons. These generate motor acts that are
congruent with AIP affordance. Visual information is, in this way, translated into motor information.
The act of grasping explained through the hypothesis of “cognitive doubling”
The simplest hypothesis is that AIP neurons transmit information about the “affordances” to the F5
neurons that generate the subsequent motor acts.
www.mind-consciousness-language.com, (2009)
Some considerations, however, lead us to believe that the simple act of grasping involves a more
complex process in which the sensory/mnestic “cognitive doubling” of both the affordance and the
In these experiments, the objects shown to the animals are in a state of rest. The two movements,
of conforming the hand to the object to be grasped and of extending the hand toward the object,
depend on the state of rest or of motion of the object itself.
Let us suppose we have to grasp a coffee cup that is on a rotating dish by the handle with a
precision hold. The handle is the affordance that the cup, perceived with our sight, offers to the
subject. This affordance, however, remains hidden for some seconds during the rotating movement
since it is covered by the side of the cup that lacks the handle. The hand conformation process
therefore depends on the rotating movement. If this movement were to stop exactly when the
affordance is hidden, the conformation movement would be useless.
Let us now consider the extension movement. It is subordinate to the cup’s position, versus the
hand, in the “t” instant in which the contact takes place. Therefore, the extension movement must not
be directed toward the point of the peri-personal space in which the object is perceived, but to the
point of the peri-personal space that the object will occupy at the moment of contact.
From what has been said above, it can be inferred that, before both movements of conformation
and extension are performed, the mind hypothesizes the movement of the object, thus anticipating its
position and the prospective conformation.
We therefore have two constructs for the affordances, the first sensory, and the second mnestic.
The mnestic affordance anticipates the sensory affordance instant by instant, and it is the mnestic
affordance that guides the conformation movement.
If we examine this carefully, anticipation, which generates the cognitive doubling of the
affordances, is also necessary in the case of objects in a state of rest.
I remember a scene from the TV program “Candid Camera”, where the actors of the “joke” tied a
banknote to a thin thread and laid it on the ground. When a passer-by leaned over to grasp the
banknote, the thread was pulled and the banknote, miraculously (for the passer-by), moved. A young
man, after trying to grasp the banknote twice, in vain, changed strategy. At the third attempt he
suddenly directed his hand, not where the banknote was, but a bit farther away, where he
hypothesized the banknote would have moved. In this way he managed to grasp it.
It is therefore plausible that there is always an hypothesis about the state of rest and/or motion of
the object we are about to grasp. In other words the passer-by, who leans over to grasp the banknote,
hypothesizes that it does not move. The prehension and extension movements of the hand depend on
www.mind-consciousness-language.com, (2009)
the initial hypothesis. The young man, having understood the trick, modifies this initial hypothesis
and with it the extension movement of the hand.
The hypothesis anticipating the state of rest and/or of motion assumes that there is a “starting
data”. No hypothesis is possible without acquired knowledge from which the hypothesis itself
When we lean over to grasp an object on the ground, we hypothesize that it remains in that position,
on the base of the perceived “real situation” and on the base of prior experience (we know, in fact,
that objects do not move by themselves as animals instead do). The hypothesis here and in other
similar circumstances, therefore originates from a single or more perceptual information and
Obviously each movement or gesture has a dual nature, hypothetical and sensory.
The hypothetical component activates a circuit that certainly involves the premotor areas, the
primary motor area, and the spinal cord with the motoneurons that innervate the muscles.
Once the motoneuron discharge has generated the twitching and relaxation of the muscles, the
process passes from the mnestic or hypothetical circuit to the sensorial circuit. The neuromuscular
spindles and the sensory receptors send information concerning the position of the corporal districts
to the primary somatic sensitive cortex. This information reaches the parietal cortex where the
verification of the motor hypothesis probably takes place.
Instant by instant therefore, the brain controls the real position of the corporal districts and based
on this, organizes the subsequent motor act. Therefore, cognitive doubling is also applied to
We should point out that there is a substantial difference between movement and perception. In
movement both the mnestic and sensory components are performed by circuits that involve various
cerebral areas; in perception, instead, only the sensory component is circuital.
www.mind-consciousness-language.com, (2009)
References
www.mind-consciousness-language.com, (2009)
The second chapter, “The brain that operates”, starts by differentiating between “movement” and
“act”. To shed light on this difference, let us consider the simple gesture of taking a cup of coffee. It
implies two independent yet co-ordinated acts: reaching and grasping. They happen in parallel,
which means that the movement of stretching the hand toward the object is accompanied by the
concomitant movement of conforming the hand to the object to be grasped.
Let us consider the latter process that concerns the act of grasping. It implies two distinct
processes: 1) transforming the geometric properties of the object, perceived by sight, into a precise
conformation of the fingers; 2) performing the desired hold, by controlling the movements of the
The second function requires the intervention of F1, the only one with direct access to the
motoneurons. However F1 is not fit to carry out the first function. In fact, it has no direct access to
visual information, and therefore cannot be involved in the process that transforms the visual
information of the object into a specific conformation of the hand.
This function must therefore be searched for in other motor areas. For some years now, we know
that F5 is essential for acts such as “grasping”.
An analysis of the behaviour of single neurons in this area has shown that it is formed by neurons,
the majority of which do not codify movements but motor acts, that is, movements co-ordinated by a
specific purpose. Many F5 neurons are activated when a monkey “grasps” a piece of food, whether it
uses its left or right hand or its mouth. Moreover, the same movement that activates a neuron during
the “grasping” act, such as the bending of a finger, does not activate it in the “scratching” act. F5
www.mind-consciousness-language.com, (2009)
neurons may be classified, on the base of the motor act they codify, into: neurons “grasping with the
hand and the mouth”, neurons “holding”, neurons “tearing”, etc.
An unexpected and interesting characteristic of F5 neurons is that a considerable number also
discharges in presence of visual stimulus.
Akira Murata and colleagues (1997) have studied the motor and visual properties of F5 neurons.
They have discovered that, of the neurons that are activated during the performance of a task, one
half discharged during grasping (motor neurons), while the other half discharged at the presentation
of the object, before it was taken or without it being taken (visual-motor neurons). Moreover all the
visual-motor neurons that only responded to a specific type of hold (motor selectivity), only
responded at the sight of objects for which that hold was effective (visual selectivity).
In order to interpret the congruence between visual and motor response of F5 neurons, it is
necessary to analyze the behaviour of neurons in the anterior interparietal area (AIP), which is
closely connected with F5. For this purpose, Hideo Sakata and colleagues (1995) have analysed the
behaviour of active neurons in AIP during the movement of the hand, dividing them into three
classes: motor dominance neurons, visual-motor neurons and visual dominance neurons. The
neurons of the first two classes are similar to F5 motor neurons and visual-motor neurons. The AIP
neurons also show visual selectivity; that is, they respond at the sight and holding of a specific object
or of a limited group of objects (Murata et al. 2000). Some respond to spherical objects, others to
cubical objects, and others to flat objects, etc.
This demonstrates that AIP and F5 neurons, which are active while an object is being held,
belong to an AIP-F5 circuit whose function is to transform the visual properties of an object into
To understand how the AIP-F5 circuit acts, we may quote the concept of “affordance” by James
J. Gibson (1977). He believed that the visual perception of an object involves an automatic selection
of those properties that allow us to interfere with it. An object such as a cup of coffee may be taken
by its handle, its upper edge, its central body. These are the visual affordances that this object offers
to the motor system. As soon as we see the cup, these “affordances” activate AIP neurons that
transmit the information to the F5 visual-motor neurons. These generate motor acts that are
congruent with AIP affordance. Visual information is, in this way, translated into motor information.
The act of grasping explained through the hypothesis of “cognitive doubling”
The simplest hypothesis is that AIP neurons transmit information about the “affordances” to the F5
neurons that generate the subsequent motor acts.
www.mind-consciousness-language.com, (2009)
Some considerations, however, lead us to believe that the simple act of grasping involves a more
complex process in which the sensory/mnestic “cognitive doubling” of both the affordance and the
In these experiments, the objects shown to the animals are in a state of rest. The two movements,
of conforming the hand to the object to be grasped and of extending the hand toward the object,
depend on the state of rest or of motion of the object itself.
Let us suppose we have to grasp a coffee cup that is on a rotating dish by the handle with a
precision hold. The handle is the affordance that the cup, perceived with our sight, offers to the
subject. This affordance, however, remains hidden for some seconds during the rotating movement
since it is covered by the side of the cup that lacks the handle. The hand conformation process
therefore depends on the rotating movement. If this movement were to stop exactly when the
affordance is hidden, the conformation movement would be useless.
Let us now consider the extension movement. It is subordinate to the cup’s position, versus the
hand, in the “t” instant in which the contact takes place. Therefore, the extension movement must not
be directed toward the point of the peri-personal space in which the object is perceived, but to the
point of the peri-personal space that the object will occupy at the moment of contact.
From what has been said above, it can be inferred that, before both movements of conformation
and extension are performed, the mind hypothesizes the movement of the object, thus anticipating its
position and the prospective conformation.
We therefore have two constructs for the affordances, the first sensory, and the second mnestic.
The mnestic affordance anticipates the sensory affordance instant by instant, and it is the mnestic
affordance that guides the conformation movement.
If we examine this carefully, anticipation, which generates the cognitive doubling of the
affordances, is also necessary in the case of objects in a state of rest.
I remember a scene from the TV program “Candid Camera”, where the actors of the “joke” tied a
banknote to a thin thread and laid it on the ground. When a passer-by leaned over to grasp the
banknote, the thread was pulled and the banknote, miraculously (for the passer-by), moved. A young
man, after trying to grasp the banknote twice, in vain, changed strategy. At the third attempt he
suddenly directed his hand, not where the banknote was, but a bit farther away, where he
hypothesized the banknote would have moved. In this way he managed to grasp it.
It is therefore plausible that there is always an hypothesis about the state of rest and/or motion of
the object we are about to grasp. In other words the passer-by, who leans over to grasp the banknote,
hypothesizes that it does not move. The prehension and extension movements of the hand depend on
www.mind-consciousness-language.com, (2009)
the initial hypothesis. The young man, having understood the trick, modifies this initial hypothesis
and with it the extension movement of the hand.
The hypothesis anticipating the state of rest and/or of motion assumes that there is a “starting
data”. No hypothesis is possible without acquired knowledge from which the hypothesis itself
When we lean over to grasp an object on the ground, we hypothesize that it remains in that position,
on the base of the perceived “real situation” and on the base of prior experience (we know, in fact,
that objects do not move by themselves as animals instead do). The hypothesis here and in other
similar circumstances, therefore originates from a single or more perceptual information and
Obviously each movement or gesture has a dual nature, hypothetical and sensory.
The hypothetical component activates a circuit that certainly involves the premotor areas, the
primary motor area, and the spinal cord with the motoneurons that innervate the muscles.
Once the motoneuron discharge has generated the twitching and relaxation of the muscles, the
process passes from the mnestic or hypothetical circuit to the sensorial circuit. The neuromuscular
spindles and the sensory receptors send information concerning the position of the corporal districts
to the primary somatic sensitive cortex. This information reaches the parietal cortex where the
verification of the motor hypothesis probably takes place.
Instant by instant therefore, the brain controls the real position of the corporal districts and based
on this, organizes the subsequent motor act. Therefore, cognitive doubling is also applied to
We should point out that there is a substantial difference between movement and perception. In
movement both the mnestic and sensory components are performed by circuits that involve various
cerebral areas; in perception, instead, only the sensory component is circuital.
www.mind-consciousness-language.com, (2009)
References